


Tsarin Madaidaicin Fiber na gani Inertial/Haɗin Haɗin Tauraron Dan Adam Tsarin Kewayawa




Siffofin Samfur
FS100 fiber optic hadedde tsarin kewayawa ya ƙunshi babban madaidaicin rufaffiyar madauki fiber-optic gyroscope, ma'adini.
Accelerometer mai sassauƙa da allon karɓa na GNSS mai girma, ta hanyar haɗin firikwensin da yawa da jagora.
Fahimtar algorithm na lissafi na iska, samar da ingantaccen yanayin kewayawa, saurin gudu da bayanin matsayi zuwa duniyar waje.
bayanai don saduwa da ma'auni mai mahimmanci da buƙatun sarrafawa.
Siffofin Samfur
- 0.8nmile/h daidaito darajar kewayawa
- Zaɓin yanayi da yawa, yanayin abin hawa / yanayin jirgin sama
- A tsaye jeri na farko 3min / girgiza tushe jeri na farko 8min
- Laifi duban kai
- Mahimman hanyoyin sadarwa, tallafi RS232, RS422, CAN da sauran daidaitattun musaya
- Babban dogaro
Yanayin aikace-aikace
-Tsarin hakowa na hankali a yankin ma'adinai
- Tushen kewayawa inertial don manyan UAVs
- marine compass
- Madaidaicin bindiga mai sarrafa kansa
- Matsayin abin hawa da daidaitawa
- Babban ma'aunin wayar hannu
- Babban madaidaici kuma barga dandamali
Halayen Lantarki
- Wutar lantarki: 24 ~ 36V DC (nau'in)
- Ƙarfin ƙima: 30W (max)
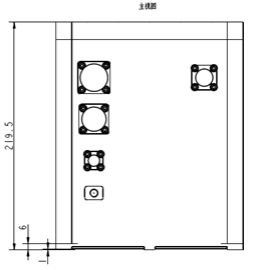
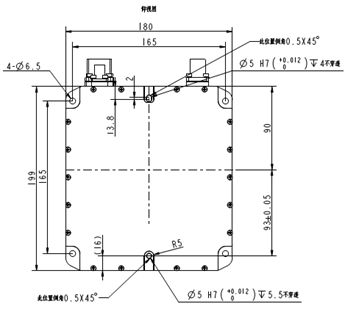
Girman Injini
Alamun fasaha
| Halaye | Siga | Fihirisa |
| Riƙe matsayi | Odometer Combo | 0.001D (D shine nisan mil) |
| Haɗin GNSS | 1.2m | |
| Inertia mai tsabta | 0.8nmile/h | |
| Daidaiton ɗabi'a | Daidaitawar farko | 0.003° |
| Riƙe ɗabi'a (GNSS naƙasasshe, inertia mai tsafta) | 0.002°/10min(RMS) | |
| Ikon wucin gadi | ≤100W (<3s) | |
|
Daidaiton jagora | arewa mai son kai | 0.05× sec (Lati), inda Latitu yana nufin latitude (RMS) |
| Riƙe kan gaba (GNSS naƙasasshe, inertia mai tsafta) | 0.003°/10min(RMS) | |
| Daidaitaccen sauri | Riƙe saurin (GNSS naƙasasshe, inertia mai tsafta) | 0.3m/s/10min(RMS) |
| Fiber na gani Gyro | Ma'auni kewayon | ± 400°/s |
| Zero son zuciya kwanciyar hankali | ≤0.01°/h | |
| Ma'adini Mai Sauƙi Accelerometer | Ma'auni kewayon | ± 20g |
| Zero son zuciya kwanciyar hankali | ≤20µg (matsakaicin 10s) | |
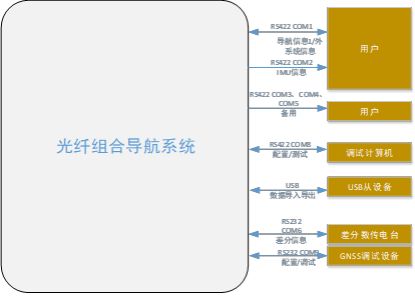
| Sadarwar Sadarwa | Saukewa: RS232 | 1 tashar (yawan baud 9.6kbps ~ 921.6kbps, tsoho 115.2kbps Mitar har zuwa 1000Hz, tsoho 200Hz) |
|
| Saukewa: RS422 | 6 tashoshi (Baud rate 9.6kbps ~ 921.6kbps, tsoho 115.2Kbps Mitar har zuwa 1000Hz, tsoho 200Hz) |
| Kaddarorin tsarin | Girman | 199 mm × 180 mm × 219.5 mm (L×W×H) |
| Nauyi | Saiti ɗaya na kewayawa inertial bai wuce 8.0kg ba (na zaɓi don aikace-aikacen jirgin sama bai wuce 6.5kg ba) | |
| Amfani da muhalli
| Yanayin ajiya | -40 ℃ ~ 65 ℃ |
| Dangi zafi | ≤80% |
Misalin aikace-aikacen
| Halaye | Siga | Fihirisa |
| Riƙe matsayi | Odometer Combo | 0.001D (D shine nisan mil) |
| Haɗin GNSS | 1.2m | |
| Inertia mai tsabta | 0.8nmile/h | |
| Daidaiton ɗabi'a | Daidaitawar farko | 0.003° |
| Riƙe ɗabi'a (GNSS naƙasasshe, inertia mai tsafta) | 0.002°/10min(RMS) | |
| Ikon wucin gadi | ≤100W (<3s) | |
|
Daidaiton jagora | arewa mai son kai | 0.05× sec (Lati), inda Latitu yana nufin latitude (RMS) |
| Riƙe kan gaba (GNSS naƙasasshe, inertia mai tsafta) | 0.003°/10min(RMS) | |
| Daidaitaccen sauri | Riƙe saurin (GNSS naƙasasshe, inertia mai tsafta) | 0.3m/s/10min(RMS) |
| Fiber na gani Gyro | Ma'auni kewayon | ± 400°/s |
| Zero son zuciya kwanciyar hankali | ≤0.01°/h | |
| Ma'adini Mai Sauƙi Accelerometer | Ma'auni kewayon | ± 20g |
| Zero son zuciya kwanciyar hankali | ≤20µg (matsakaicin 10s) | |
| Sadarwar Sadarwa | Saukewa: RS232 | 1 tashar (yawan baud 9.6kbps ~ 921.6kbps, tsoho 115.2kbps Mitar har zuwa 1000Hz, tsoho 200Hz) |
|
| Saukewa: RS422 | 6 tashoshi (Baud rate 9.6kbps ~ 921.6kbps, tsoho 115.2Kbps Mitar har zuwa 1000Hz, tsoho 200Hz) |
| Kaddarorin tsarin | Girman | 199 mm × 180 mm × 219.5 mm (L×W×H) |
| Nauyi | Saiti ɗaya na kewayawa inertial bai wuce 8.0kg ba (na zaɓi don aikace-aikacen jirgin sama bai wuce 6.5kg ba) | |
| Amfani da muhalli
| Yanayin ajiya | -40 ℃ ~ 65 ℃ |
| Dangi zafi | ≤80% |






