





Haɗin Tsarin Kewayawa




Siffofin Samfur
MS100-B0 hadedde tsarin kewayawa yana da ginannen babban aiki MEMS gyroscope da accelerometer.
Kuma tauraron dan adam kewayawa module, na iya cimma babban madaidaicin hali na waje, saurin gudu, matsayi
Aunawa.Tare da iyawar haɗakar firikwensin da yawa, ana iya haɗa shi tare da na'urori na waje, masu saurin gudu, da sauransu.
An haɗa bayanin don kiyaye daidaiton kewayawa lokacin da GNSS ba shi da inganci.
Siffofin Samfur
-0.1° daidaito hali, 2m daidaitaccen matsayi
- Mai ikon haɗakar firikwensin taimako na waje
- Yanayin zafin aiki: -40 ℃ ~ + 60 ℃
- Babban girgiza da juriya na girgiza
- IP65 rufaffiyar shinge don yanayi mara kyau
- Mahimman hanyoyin sadarwa, tallafi RS232, RS422, CAN da sauran daidaitattun musaya
- Babban dogaro
Halayen Lantarki
- wutar lantarki: 5V (nau'i)
- Ƙarfin ƙima: 3W (max)
- Ripple: 100mV (kololuwa zuwa ganiya)
Yanayin aikace-aikace
Ta hanyar daidaita software don yanayin aikace-aikacen daban-daban, ana iya amfani da samfurin a cikin injinan gini
Sabis mai hankali da sakawa, tsarin tuki ta atomatik mara matuki, sarrafa saka kayan aiki mai girma, kasuwanci
jirage marasa matuka na masana'antu, da dai sauransu.
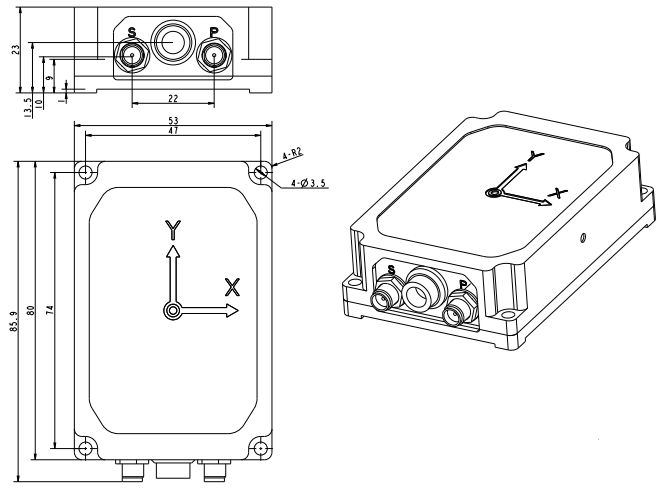
Girman Injini
Alamun fasaha
| Halaye | Siga | Fihirisa | Magana |
| Daidaiton jagora |
Dual GNSS |
0.1° | 2m Baseline |
| GNSS guda daya | 0.2° | Bukatar motsawa | |
| Bayan aiwatarwa |
0.03° |
| |
| Kula da daidaito | 0.2°/min | GNSS gazawar | |
| Daidaiton ɗabi'a | GNSS mai inganci | 0.1° | Matsayi guda L1/L2 |
| Inertia/Odometer Combo | 0.1° (RMS) | Na zaɓi | |
| Bayan aiwatarwa | 0.02° |
| |
| Kula da daidaito | 0.2°/min | GNSS gazawar | |
| Yanayin VG | 2° | Lokacin gazawar GNSS mara iyaka, babu hanzari | |
| Daidaitaccen matsayi na tsaye | GNSS mai inganci | 1.2m | Matsayi guda L1/L2 |
|
| 2cm+1ppm | RTK | |
| Inertia/Odometer Combo | 2‰D (D yana nufin nisan mil, CEP) | Na zaɓi | |
| bayan aiwatarwa | 1cm+1ppm |
| |
| GNSS gazawar | 20m | Rashin gaza 60s | |
| Daidaitaccen saurin a kwance | GNSS mai inganci | 0.1m/s | Matsayi guda L1/L2 |
| Inertia/Odometer Combo | 0.1m/s (RMS) | Na zaɓi | |
| Haɗin Inertia/DVL |
0.2m/s (RMS) |
Na zaɓi | |
| Gyro | Ma'auni kewayon | ± 450°/s |
|
| Zero son zuciya kwanciyar hankali | 2°/h | Allan bambancin | |
| Accelerometer | Ma'auni kewayon | ± 16g | Za a iya daidaita 200 g |
| Zero son zuciya kwanciyar hankali | 30µg ku | Allan bambancin | |
| Sadarwar Sadarwa
| Saukewa: RS232 | 1 tashar | Zabi 1 tashar RS422, 1 tashar RS232 |
| Saukewa: RS422 | 1 tashar | Ko 2 tashar RS422, 1 tashar CAN | |
| CAN | 1 tashar |
| |
| Shigar da bambancin Odometer | 1 tashar | na zaɓi | |
| PPS fitarwa | 1 tashar | na zaɓi | |
| shigar da EVENT | 1 tashar | na zaɓi | |
| Halayen Lantarki | Wutar lantarki | 5 ~ 36V DC |
|
| Amfanin wutar lantarki |
≤3W |
| |
| Ripple | 100mV | PP | |
|
Kaddarorin tsarin | Girman | 80mm × 53 mm × 23 mm |
|
| Nauyi | ≤150g |
| |
|
Amfani da muhalli | Yanayin aiki | -40 ℃ ~ + 60 ℃ |
|
| Yanayin ajiya |
-45 ℃ ~ + 65 ℃ |
| |
|
Jijjiga |
20 ~ 2000 Hz,6.06g ku |
| |
| Tasiri |
30 g,11ms |
| |
| Ajin kariya | IP65 |
| |
|
Abin dogaro | Farashin MTBF | 30000h |
|
| Rayuwa | > shekaru 15 |
| |
| Lokacin aiki na ci gaba |
>24h |
| Halaye | Siga | Fihirisa | Magana |
| Daidaiton jagora |
Dual GNSS |
0.1° | 2m Baseline |
| GNSS guda daya | 0.2° | Bukatar motsawa | |
| Bayan aiwatarwa |
0.03° |
| |
| Kula da daidaito | 0.2°/min | GNSS gazawar | |
| Daidaiton ɗabi'a | GNSS mai inganci | 0.1° | Matsayi guda L1/L2 |
| Inertia/Odometer Combo | 0.1° (RMS) | Na zaɓi | |
| Bayan aiwatarwa | 0.02° |
| |
| Kula da daidaito | 0.2°/min | GNSS gazawar | |
| Yanayin VG | 2° | Lokacin gazawar GNSS mara iyaka, babu hanzari | |
| Daidaitaccen matsayi na tsaye | GNSS mai inganci | 1.2m | Matsayi guda L1/L2 |
|
| 2cm+1ppm | RTK | |
| Inertia/Odometer Combo | 2‰D (D yana nufin nisan mil, CEP) | Na zaɓi | |
| bayan aiwatarwa | 1cm+1ppm |
| |
| GNSS gazawar | 20m | Rashin gaza 60s | |
| Daidaitaccen saurin a kwance | GNSS mai inganci | 0.1m/s | Matsayi guda L1/L2 |
| Inertia/Odometer Combo | 0.1m/s (RMS) | Na zaɓi | |
| Haɗin Inertia/DVL |
0.2m/s (RMS) |
Na zaɓi | |
| Gyro | Ma'auni kewayon | ± 450°/s |
|
| Zero son zuciya kwanciyar hankali | 2°/h | Allan bambancin | |
| Accelerometer | Ma'auni kewayon | ± 16g | Za a iya daidaita 200 g |
| Zero son zuciya kwanciyar hankali | 30µg ku | Allan bambancin | |
| Sadarwar Sadarwa
| Saukewa: RS232 | 1 tashar | Zabi 1 tashar RS422, 1 tashar RS232 |
| Saukewa: RS422 | 1 tashar | Ko 2 tashar RS422, 1 tashar CAN | |
| CAN | 1 tashar |
| |
| Shigar da bambancin Odometer | 1 tashar | na zaɓi | |
| PPS fitarwa | 1 tashar | na zaɓi | |
| shigar da EVENT | 1 tashar | na zaɓi | |
| Halayen Lantarki | Wutar lantarki | 5 ~ 36V DC |
|
| Amfanin wutar lantarki |
≤3W |
| |
| Ripple | 100mV | PP | |
|
Kaddarorin tsarin | Girman | 80mm × 53 mm × 23 mm |
|
| Nauyi | ≤150g |
| |
|
Amfani da muhalli | Yanayin aiki | -40 ℃ ~ + 60 ℃ |
|
| Yanayin ajiya |
-45 ℃ ~ + 65 ℃ |
| |
|
Jijjiga |
20 ~ 2000Hz, 6.06g |
| |
| Tasiri |
30g, 11m |
| |
| Ajin kariya | IP65 |
| |
|
Abin dogaro | Farashin MTBF | 30000h |
|
| Rayuwa | > shekaru 15 |
| |
| Lokacin aiki na ci gaba |
>24h |






