RLG-Axis Biyu-Axis Indexing Inertial Navigation System




Bayanin samfur
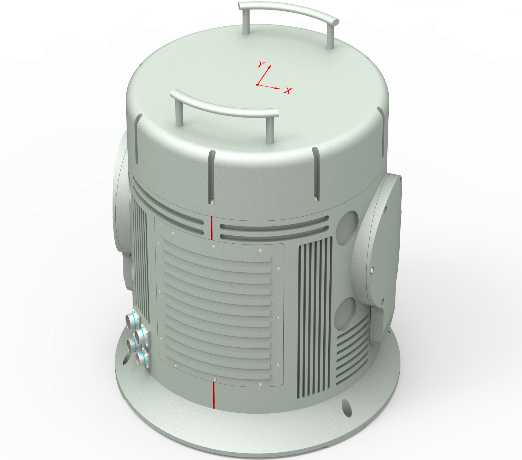
RL2-90 Tsarin Kewayawa Inertial, mafita mai yankewa don madaidaicin kewayawa.An sanye shi da nau'in gyroscope Laser zobe na nau'in 90 da madaidaicin ma'aunin accelerometer, yana ba da ingantaccen saurin gudu, matsayi, da bayanin halaye.Yana haɗawa ba tare da matsala ba tare da GNSS, altimeter, da mitoci masu saurin iska, yana sa ya dace da masu jigilar iska da ƙasa.Ko a cikin tankuna, motocin sulke, jirgin sama, drones, jiragen ruwa, ko jirgin kasa mai sauri, wannan tsarin yana tabbatar da ingantaccen sarrafa jirgin sama, daidaita yanayin hali, da matsayi.Tare da babban daidaito a cikin duka tsantsar kewayawa marar aiki da haɗe-haɗen yanayin kewayawa, RL2-90 amintaccen abokin tarayya ne don dogaro da madaidaicin kewayawa cikin aikace-aikace daban-daban.
PSIFFOFIN ARZIKI
l Injin indexing na axis biyu don rage kuskure
l High daidaito zobe Laser gyro da ma'adini accelerometer
l Daidaitaccen tsaye ko motsi tushe kai tsaye
l Kuskure sigogi daidaitawa da diyya a cikin cikakken kewayon zafin jiki
l Hanyoyin shigarwa daban-daban na zaɓi don GNSS/Odometer/DVL
l Hanyoyin kewayawa masu daidaitawa
l Kyakkyawan dacewa da muhalli
l Matsayin soja
AYANAR GIZO
l Kewayawa abin hawan karkashin teku
l Matsayi da neman arewa don abin hawa na ƙasa
l Ƙarfafawa da sarrafawa don motsi mai motsi
l Ma'aunin hali don aikace-aikacen da ake buƙata
MAYYUKAN AIN
l Yana da aikin fitar da bayanai kamar matsayi mai ɗaukar hoto, kan gaba, kusurwar hali, ƙimar angular da sauri a ainihin lokacin;
l Yana da hanyoyin aiki kamar tsantsar kewayawa marar aiki da INS/GNSS (ciki har da Beidou) hadedde kewayawa;
l Mallakar da aikin karɓar bayanan kewayawa tauraron dan adam wanda aka bayar ta tsarin mitar lokaci na waje daidaitaccen kayan aiki;
l Yana da aikin haɗin kai na ƙasa kuma yana goyan bayan aikin daidaitawar iska;
l Yana da ayyuka kamar ƙarfin gwajin kai, gwajin kai na lokaci-lokaci, rahoton matsayi, ramuwa na kuskuren shigarwa, da ajiya mara ƙarfi.
PMALAMAN AIKI
| Daidaiton tsarin Daidaiton Tsari | Kewayawa Mai Tsabtatawa/Tsaftataccen Kewayawa Inertial | 2.0nmile/5d, PEAK | |
| Haɗin Kewayawa/Kewayawa tare da GNSS | ≤5m, 1σ | ||
| Matsakaicin kai /wa | 0.01°, RMS | ||
| Halin tsaye (mirgina da farar) Hankali na kwance (mirgina & farar) | 0.005°, RMS | ||
| Tsantsar Gudun Inertial | 1.0m/s, RMS | ||
| Haɗin GNSS Gudun kewayawa | 0.1 m/s, RMS | ||
| Manuniya na na'urorin inertial Gyro da Accelerometer Parameters | Laser gyroscope _ Gyroscope | Rage/Rage | ± 600 deg/s |
| Tsananin son zuciya | ≤0.002 deg/h, 1σ | ||
| Maimaituwar son zuciya | ≤0.002 deg/h, 1σ | ||
| Scale Factor rashin layin layi | 1 ppm | ||
| Accelerometer Accelerometer | Rage/Rage | ± 15g ku | |
| Tsananin son zuciya | ≤10μg, 1 σ | ||
| Zero son zuciya maimaitawa Maimaituwar son zuciya | ≤10μg, 1 σ | ||
| Scale Factor rashin layin layi | 15 ppm | ||
| daidaita lokaci Lokacin Daidaitawa | Farawar Sanyi | ≤ 15 min | |
| Sake farawa | ≤ 10 min | ||
| Farkon Jirgin Sama/In-Jigin | ≤15 min | ||
| Lokacin aiki Lokacin Aiki | Lokacin aiki na ci gaba / Lokacin Aiki | fiye da 10h | |
| Siffofin Sadarwa dubawa | Ƙarfin wutar lantarki / Ƙarfin wutar lantarki | 18 ~ 36VDC | |
| Amfanin Wuta | ≤ 40W @ 24VDC | ||
| Wutar lantarki/Lantarki | RS232 × 2 RS422 × 3 CAN × 2 Ethernet × 1 1 shafi × 1 | ||
| Ƙimar Sabunta bayanai (mai daidaitawa) | 200Hz@115.2kbps | ||
| Amfani da muhalli Muhalli | Yanayin Aiki | -40°C ~ +65°C | |
| Ma'ajiyar zafin jiki/Ajiya | -55°C~+85°C | ||
| Yi amfani da Altitude/Altitude | 20000m | ||
| Danshi | 95% (+25°C) | ||
| Jijjiga/Vibration | 5g @ 20 ~ 2000Hz | ||
| Girgizawa/Tsoro | 40 g, 11 ms, 1/2 Sin | ||
| Kaddarorin jiki Na zahiri | Girma / Girma (Φ*H) | 540 x 536 mm | |
| Nauyi / Nauyi | 55 kg | ||
Lura: Za a iya keɓance tsarin bisa ga buƙatun mai amfani.